"계기 접근을 시작하여 목적지의 공항의 육안으로 식별 가능한 활주로 착륙지점까지 안전하게 강하는 구간"
라는 설명을 유튜브에서 보긴 했지만 CAT 3 with no DH의 경우 식별 되지 않아도 착륙은 가능하므로 100% 정확한 설명은 아닌 것 같음.
SH란?
이착륙시 Screen Height 활주로 끝에서 항공기가 도달해야 하는 최소 고도
* 이륙 - Type A 35ft(wet 15ft), Type B 50ft
* 착륙 - 50ft
Approach Segment 구성
* 모든 approach는 initial, intermediate, final로 나뉨
1. Enroute Descent ~ IAF(Initial Appr Fix)
아직 명확하진 않음
고도, 속도를 ATC의 지시에 따라 조절하면서 APPR를 준비하는 기간
2. IAF ~ IF(Intermediate Fix) : Initial
항공기를 Appr course와 30도 이내로 정렬(ARC Turn, course reversal등이 있음)
*** initial : Nav Accuracy 확인, appr type과 strategy 선택 (보통 IAF~IF)
1. F-PLN Sequencing (앞으로 갈 경로만 남기고 지나지 않은 경로 정리) * Nav일 때, 자동으로 sequence 되지만 HDG/TRK mode에서는 FPLN RTE대로 날때만 sequence가 자동으로 된다. *Sequencing은 missed approach route가 GA가능한지 확인하고,정확한 예측인지 확실시 할 때 중요함 *F-PLAN sequence 모니터하는 좋은 방법은 ND 오른쪽 상단 TO waypoint가 내가 가고자 하는 곳을 표시하는지 확인 *자동으로 시퀀싱되지 않으면 직접 수동으로 시퀀싱 * DIR TO RADIAL IN은 FDP이전에만 사용해야함 (설정값과 실제 TRK 차이가 140도 미만일 때 사용 가능) * DIR TO 혹은 DIR TO RADIAL IN 기능 사용시 NAV 모드 작동되고, 작동 안되면 수동으로 당겨 NAV 해제하고 HDG 작동 * HDG에서는 자동으로 감속되지 않음 * LOC 모드 혹은 F-LOC 모드인 상태로 APPR누르고 DIR TO를 수행하면 NAV 모드로 되돌아가게 되서 시퀀싱 후 APPR FCU 눌러야함
2. APPROACH PHASE ACTIVATION Vapp 혹은 스피드 FDP에서의 CSTR으로 감속을 시작한다. * NAV+MANAGED SPEED인 경우, APPR PHASE는 자동으로 DECEL PSEUDO-WPT를 지날때 시퀀싱 액티베이트 된다. 만약 EARLY DECEL이 필요한 경우, MCDU PERF APPR 페이지에서 액티베이트 시킬 수 있다. 액티브되면 마젠타 타겟 스피드는 Vapp여야한다. (입력이 필요할 수도 있다) * HDG 모드 때(레이더 벡터링) 수동으로 APPR PHASE ACTIVATE 해야한다
3.IF ~ FAF(Final Appr Fix) : Intermediate
항공기를 공항에 최종 강하 시키기 위해 준비( Stablized)
* Stablized 상태란?
1) Landing Config(Gear down, Flap full or Flap3)
2) Airspeed (Vapp)
3) Final appr crs alignment
4) Before LDG C/L Done
*** Intermediate : A/C deceleration을 Strategy에 따라 조정, Final appr path interception 조정,flying reference 선택
1. GENERAL : INTERMEDIATE APPR은 비행기를 적절한 속도, 고도, CONFIGURATION으로 만들어서 FDP로 가는 것
2. DECELERATION & CONFIGURATION CHANGE
*MANAGED SPEED가 권장되고, 한번 APPR PHASE가 액티브되면, VAPP보다 높은 속도라면 A/THR는비행기 스피드를 현 CONFIG의 조작 속도를 향해 안내할 것이다. 예) GREEN DOT FOR CONF0, S SPEED FOR CONF1... * 안정적인 감속과 THRUST 변동을 최소화하기 위해서 MENEUVERING SPEED +10KT에 이르면 다음 CONF으로 진행해야한다. * DECELERATION RATE 10KT/NM, 20KT/NM-SPEEDBRK
* SELECTED SPEED는 ATC를 따르기 위해 사용되며, FCU에서 선택하고, MENEUVERING SPEED 이하 속도가 선택되면 Vls 이상의 속도가 선택되고, ATC 속도 따를 필요가 없는 경우 다시 MANAGED SPEED를 FCU에서 선택한다. * SELECTED SPEED로 INTERMEDIATE APPR를 진행하는 경우 APPR PHASE를 활성화 해야 하는데, 이는 보다 적절한 감속을 보장하고, 그렇지 않으면 비행기는 이전 적용 가능한 DESCENT PHASE 속도로 가속할 것이다. * TAIL WIND, HIGH WEIGHT 같은 경우 감속률이 충분하지 않을 수 있다. 이러한 경우 L//G를 220 KT 이하에서 FLAP2 이전에 내릴 수 있다. * SPEED BRKER는 감속률를 올려주지만, VLS가 증가하고, 저속에선 효과가 적고, 스피드 브레이크의 자동 RETRACTION은 CONF FULL을 선택할 때만 작동
4. Final Appr
최종적으로 활주로를 확인하고 착륙을 위한 지점까지 진행하는 단계
조종사가 Visual로 착륙할 수 있는 지점까지 유도
Minimum에서 Visual reference에 따라 Go around 할지 Continue 할 지 결정
*** Final : 의도된 appr mode가 올바르게 engage 되었는지 모니터, appr strategy에 따른 trajectory 모니터, stabilized at 1000ft (IMC)
* FINAL APP 혹 FLS로 비행할 때 정확한 BARO 설정이 필요함, 급격한 변화나 final approach에서 RA가 급격하게 떨어진다면 BARO setting이 잘못 되었다는 증상일 수 있다.
1. A/THR의 사용 * 정확한 속도 조절을 위해 A/THR을 사용해야 한다. PF는 계속해서 손을 THRUST LEVER에 올려두고 필요시 반응할 수 있도록 한다(TOGA) * FINAL APPR중에는 바람의 성격에 따라 MANAGED TARGT SPEED가 움직인다.(ATC가 새로운 바람 정보를 주면 MCDU PERF APPR에 업뎃 * ND의 GS를 참조해서 목표 속도가 합리적인지 확인 * A/THR가 만족스럽게 일을 못하면, A/THR 해제하고 수동으로 컨트롤 해야 하고, 늦어도 1000FT 에서는 해제해야 함
2. TRAJECTORY STABILZATION (비행 경로 안정화) * PM이 벗어난 부분을 아나운스->PF가 이를 교정, 만약 회복이 어렵다 -> GA
3. AP DISCONNECTION * AP ENGAGED 된 상태로 FINAL APPR한다면 비행기는 STABILIZED 되어야 한다. 그래서 수동 랜딩을 위한 AP DISCONNECTING은 급격한 사이드 인풋은 지양해야 한다. * 너무 늦으면 안되고, 바람에 떠밀리지 않도록 조작해야 한다. * 하강률, 드리프트 보정이 너무 빨리되어도 안 됨
개념을 정리하고 표현을 체크해 보기 위한 포스팅이므로 한국어 설명에서도 영어표현이 많이 포함되어 있습니다.
모든 내용은 EASA 기준 입니다. 스스로의 공부를 위한 포스팅이므로 잘못된 부분이 있다면 피드백 부탁드립니다.
왜 M&B가 중요한가?
Why is the Mass and Balance important?
중량과 무게중심 등에 따라 사용되는 연료량이 달라질 뿐 아니라 Performance와 Stability에 영향을 주게 되어 안전성에 영향을 미친다.
항공법에 따라 정해진 규정이 있으므로, 각종 최대 중량등을 조금만 초과하더라도 면장이 의미 없어지는 상황이 발생할 수 있다.
Mass and Balance affects every aspect of flight, not only influencing the amount of fuel consumed but also the aircraft's performance and stability, both of which directly impact safety. Personally, it is extremely critical not to exceed various maximum mass and balance limits to ensure compliance with aviation regulations and maintain your license safe.
Mass&Balance의 limitation
Limitation in the Mass&Balance
크게 2가지로 분류된다.
Mass Limitation 과 CG Position Limitation
Mass Limitation에는 Structure limit, Performance limit이 있다.
나중에 Cargo에서는 Running Load와 Area Load에 의해 중량등이 제한된다.
Mass and Balance limitations are broadly classified into two main categories
: CG ( Balance) Position Limitation and Mass Limitation.
Under Mass Limitation, there are two subcategories: Structure Limitation and Performance Limitation.
In the cargo section, limitations on mass are influenced by Running Load and Area Load.
Overlading의 영향
비행의 4가지 힘(Lift, weight, thrust, drag)는 기체에 Stress를 유도하며 이 Stress는 급격한 범주의 온도에 노출시키게 한다.
이는 영구적 손상뿐 아니라 Structure를 완전히 망가뜨리는 Fatigue을 발생시킨다.
또한 Weight의 증가는 Performance에 부정적인 영향을 미치고 wing root stress 증가, Manoeuvrability 감소로 이어진다.
- Performance가 떨어진다는것은
T/O 거리 증가 (V1, Vr, V2 증가/ Climb gradient, rate of climb, ceiling height 감소)
Rate of descent 증가
Stall speed 증가, Maximum speed 감소
Safety margins 감소, low & high speed buffet 감소
Drag 증가, Fuel consumption 감소
Range & Endurance 감소
DLL(Design Limit Load) : 일반적인 운행에서 반복적으로 작용하더라도 Fatigue가 쌓이지 않는 최대 하중
DUL(Design Ultimate Load) : Emergengy 랜딩이나 유난히 강한 Gust 상황에서 부서짐 없이 견딜 수 있는 최소 하중
보통 안전상의 이유로 DUL은 DLL의 1.5에서 2배 가량으로 설정하며, DLL의 1.5배 가량의 하중을 적어도 3초 이상 고장없이 견딜 수 있어야 한다. DUL 초과시 Damage 혹은 Collapse까지 일어날 수 있다.
DUL은 적어도 이 기체는 이 정도는 견딘다라는 의미이므로 Maximum이 아닌 Minimum load인 것이다.
The four forces of lift, weight, thrust and drag induce stess to the airflame and expose to the extream range of temperature, which generates fatigue that means not only permenent loss but eventually collapse.
In addition, the increasing in weight leads to the negative effect on its performance and increase stress of wing root and decrease manoeuvrability.
DLL(Design Limit Load) : the maximum load that can be applied repeatly in the normal operation without extra fatigue
DUL(Design Ultimate Load): The minimum load that structure must obsorb in an emergency without collapsing at least 3 seconds. Normally, it is set from 1.5 to 2 times of DLL for the safety margines.
CG Position limit 과 effect
우선 CG, Center of Gravity에 대해 알아보자.
한국어로는 무게중심이라 할 수 있다.
모든 무게의 중심이므로 해당 부분을 손가락으로 들 수 있다면 중심을 잡을 수 있는 부분이다.
또한 비행기의 3가지 축의 중심이며 CG가 flight path를 따라 가므로 Control에 큰 영향을 끼친다.
비행기에는 적절한 Stability와 Control을 위하 CG limitation이 존재한다.
보통 여객기의 경우 날개는 강력한 Lift에 의하여 위로 힘을 받게 되고 꼬리날개의 경우 negative lift를 생성하여 아래로 내리게 된다.
그러므로 머리가 무겁다는 것, CG가 앞쪽에 있다는 것은 안정적이고, manoeuvrability 가 떨어지는 것을 의미한다.
꼬리가 무겁다는 것, CG가 뒷쪽에 있다는 것은 매우 Control이 민감하고 Stability가 떨어지는 것을 의미한다.
CG 이동 - 증감량, 이동
*추후 이미지 삽입
Definition
대표사진 삭제
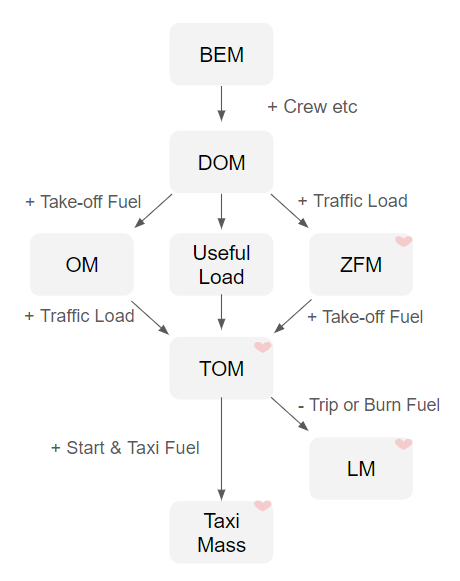
하트 표시는 DLL의 기준이며, Structure limit들이다.
- BEM(Basic Empty Mass)
최소 연료만 가진 상태로 비행기가 배달 왔을 때 상상하면 쉽게 이해할 수 있다.
mass of the aeroplane plus unusable fluids, fire extinguishers, emergency oxygen equipment, supplementary electronics etc